

Image - License_plate_Tirana.JPG
Public Domain | Link
A lot of openCV based programs depend on blob detection for extracting region of interest for post processing. There are numerous blob identification libraries such as cvblob , cvbloblib and the newer opencvblob.
The code below is a slightly different algorithm that detects connected components from the Image. The key to understanding this algorithm is to know the inheritance, relation and state of the pixels surrounding each other.
To analyze the image, first we start off running through one scan line at a time. As soon as a black pixel is encountered, it is the treated as the start of the blob. If the next pixel in the scan line is also black than the scanning continues else the program jumps to next scan line. Also when the first black pixel of the scan line is determined, a check is made if the next scan line has a black pixel below it. If it is present then it indicates the there is continuation of the blob in the next scan line. So the vertical inheritance is flagged and the program continues to progress in the scan line. When the program reaches to the next scan line, it checks if the black pixel has veritcal inheritence, if yes then it is part of the current blob that is being scanned.
To analyze the image, first we start off running through one scan line at a time. As soon as a black pixel is encountered, it is the treated as the start of the blob. If the next pixel in the scan line is also black than the scanning continues else the program jumps to next scan line. Also when the first black pixel of the scan line is determined, a check is made if the next scan line has a black pixel below it. If it is present then it indicates the there is continuation of the blob in the next scan line. So the vertical inheritance is flagged and the program continues to progress in the scan line. When the program reaches to the next scan line, it checks if the black pixel has veritcal inheritence, if yes then it is part of the current blob that is being scanned.
A Matrix (in the form of IPlImage) called Process_Flag is maintained to make sure a black pixel encountered is flagged as analyzed for further scanning. This way one black pixel part of a particular blob doesn't get added again as part of another blob.
Note that majority of the "if-else" conditions in the code is to handle traversing through the inheritance. Also the pixel count of the blob and 2 points giving the span of the blob is recorded and updated on the fly while scanning.

Try out the program on a still image to study the various detection capabilities of the program. Additional training images are available in the shared link
Tweaking the code:
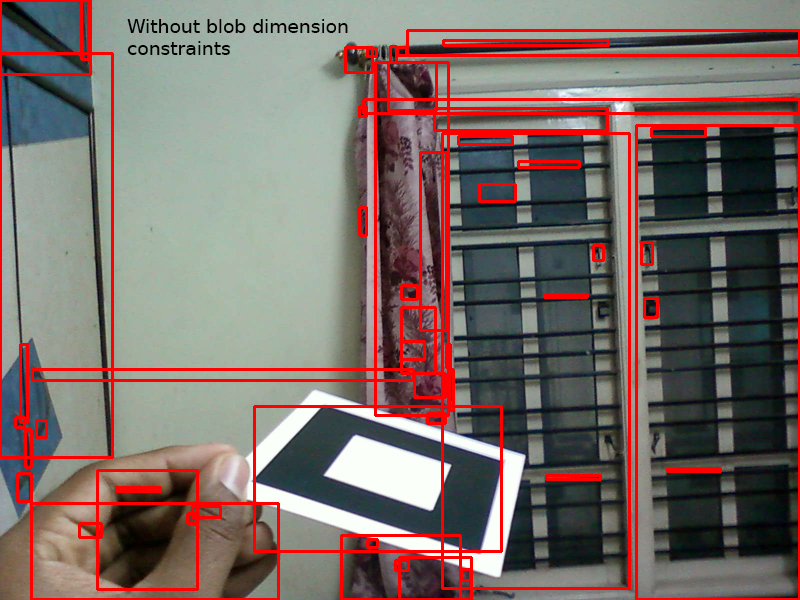
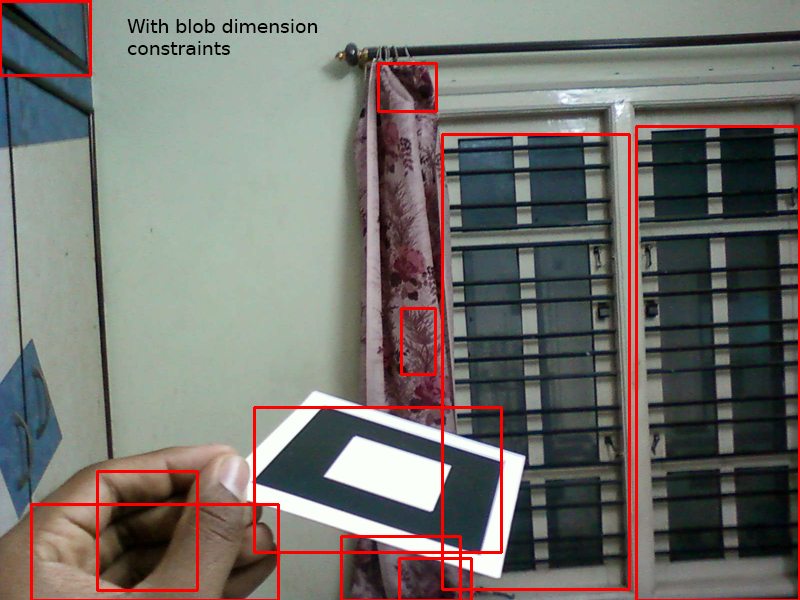
The program can be tweaked to reduce or minimize unwanted blobs that contain only 3 or 4 pixels or is 1 pixel wide and 100 pixel long. To remove such blobs, you can filter using the count of pixels in each blob. Also we already store the start and end points of each blob that gives us the span of the blob. By calculating the aspect ratio of the blob and the number of pixels in each blob - we can eliminate irrelevant blobs.
The image below depicts the decision making -

Example code snippet that allows all blobs to be seen
rectw = abs(cornerA.x - cornerB.x);
recth = abs(cornerA.y - cornerB.y);
aspect_ratio = (double)rectw / (double)recth;
if(n > 20)
{
if(aspect_ratio > 0)
{
Now change this to -
int min_blob_sze = 400; // Minimum Blob size limit
int max_blob_sze = 150000; // Maximum Blob size limit
rectw = abs(cornerA.x - cornerB.x);
recth = abs(cornerA.y - cornerB.y);
aspect_ratio = (double)rectw / (double)recth;
if((n > min_blob_sze) && (n < max_blob_sze)) // Reduces chances of decoding erroneous 'Blobs' as markers
{
if((aspect_ratio > 0.33) && (aspect_ratio < 3.0)) // Increases chances of identified 'Blobs' to be close to Square
{
Notice the difference between the two images -
Usage:
cmake . make # For detecting blobs from camera frames ./video # For detecting blobs in a still image ./still <image.jpg>
Files:
Download from DsynFLO box folder -
Source - https://app.box.com/s/r42ua57wco3z3h00j4wt
Training Images - https://app.box.com/s/d1zj7l5d9qja8kvod55x
Compatibility > OpenCV 1.0
Source Code :
//______________________________________________________________________________________
// Program : OpenCV connected component analysis
// Author : Bharath Prabhuswamy
//______________________________________________________________________________________
#include <cv.h>
#include <highgui.h>
#include <math.h>
#include <stdio.h>
#include <string.h>
void cv_adjustBox(int x, int y, CvPoint& A, CvPoint& B); // Routine to update Bounding Box corners
// Start of Main Loop
//------------------------------------------------------------------------------------------------------------------------
int main ( int argc, char **argv )
{
CvCapture* capture = 0;
IplImage* img = 0;
capture = cvCaptureFromCAM( 0 );
if ( !capture ) // Check for Camera capture
return -1;
cvNamedWindow("Camera",CV_WINDOW_AUTOSIZE);
//cvNamedWindow("Threshold",CV_WINDOW_AUTOSIZE);
// cvNamedWindow("Test",CV_WINDOW_AUTOSIZE); // Test window to push any visuals during debugging
IplImage* gray = 0;
IplImage* thres = 0;
IplImage* prcs_flg = 0; // Process flag to flag whether the current pixel is already processed as part blob detection
int q,i; // Intermidiate variables
int h,w; // Variables to store Image Height and Width
int ihist[256]; // Array to store Histogram values
float hist_val[256]; // Array to store Normalised Histogram values
int blob_count;
int n; // Number of pixels in a blob
int pos ; // Position or pixel value of the image
int rectw,recth; // Width and Height of the Bounding Box
double aspect_ratio; // Aspect Ratio of the Bounding Box
int min_blob_sze = 400; // Minimum Blob size limit
int max_blob_sze = 150000; // Maximum Blob size limit
bool init = false; // Flag to identify initialization of Image objects
//Step : Capture a frame from Camera for creating and initializing manipulation variables
//Info : Inbuit functions from OpenCV
//Note :
if(init == false)
{
img = cvQueryFrame( capture ); // Query for the frame
if( !img ) // Exit if camera frame is not obtained
return -1;
// Creation of Intermediate 'Image' Objects required later
gray = cvCreateImage( cvGetSize(img), 8, 1 ); // To hold Grayscale Image
thres = cvCreateImage( cvGetSize(img), 8, 1 ); // To hold OTSU thresholded Image
prcs_flg = cvCreateImage( cvGetSize(img), 8, 1 ); // To hold Map of 'per Pixel' Flag to keep track while identifing Blobs
init = true;
}
int clr_flg[img->width]; // Array representing elements of entire current row to assign Blob number
int clrprev_flg[img->width]; // Array representing elements of entire previous row to assign Blob number
h = img->height; // Height and width of the Image
w = img->width;
int key = 0;
while(key != 'q') // While loop to query for Camera frame
{
//Step : Capture Image from Camera
//Info : Inbuit function from OpenCV
//Note :
img = cvQueryFrame( capture ); // Query for the frame
//Step : Convert Image captured from Camera to GrayScale
//Info : Inbuit function from OpenCV
//Note : Image from Camera and Grayscale are held using seperate "IplImage" objects
cvCvtColor(img,gray,CV_RGB2GRAY); // Convert RGB image to Gray
//Step : Threshold the image using optimum Threshold value obtained from OTSU method
//Info :
//Note :
memset(ihist, 0, 256);
for(int j = 0; j < gray->height; ++j) // Use Histogram values from Gray image
{
uchar* hist = (uchar*) (gray->imageData + j * gray->widthStep);
for(int i = 0; i < gray->width; i++ )
{
pos = hist[i]; // Check the pixel value
ihist[pos] += 1; // Use the pixel value as the position/"Weight"
}
}
//Parameters required to calculate threshold using OTSU Method
float prbn = 0.0; // First order cumulative
float meanitr = 0.0; // Second order cumulative
float meanglb = 0.0; // Global mean level
int OPT_THRESH_VAL = 0; // Optimum threshold value
float param1,param2; // Parameters required to work out OTSU threshold algorithm
double param3 = 0.0;
//Normalise histogram values and calculate global mean level
for(int i = 0; i < 256; ++i)
{
hist_val[i] = ihist[i] / (float)(w * h);
meanglb += ((float)i * hist_val[i]);
}
// Implementation of OTSU algorithm
for (int i = 0; i < 255; i++)
{
prbn += (float)hist_val[i];
meanitr += ((float)i * hist_val[i]);
param1 = (float)((meanglb * prbn) - meanitr);
param2 = (float)(param1 * param1) /(float) ( prbn * (1.0f - prbn) );
if (param2 > param3)
{
param3 = param2;
OPT_THRESH_VAL = i; // Update the "Weight/Value" as Optimum Threshold value
}
}
cvThreshold(gray,thres,OPT_THRESH_VAL,255,CV_THRESH_BINARY); //Threshold the Image using the value obtained from OTSU method
//Step : Identify Blobs in the OTSU Thresholded Image
//Info : Custom Algorithm to Identify blobs
//Note : This is a complicated method. Better refer the presentation, documentation or the Demo
blob_count = 0; // Current Blob number used to represent the Blob
CvPoint cornerA,cornerB; // Two Corners to represent Bounding Box
memset(clr_flg, 0, w); // Reset all the array elements ; Flag for tracking progress
memset(clrprev_flg, 0, w);
cvZero(prcs_flg); // Reset all Process flags
for( int y = 0; y < thres->height; ++y) //Start full scan of the image by incrementing y
{
uchar* prsnt = (uchar*) (thres->imageData + y * thres->widthStep);
uchar* pntr_flg = (uchar*) (prcs_flg->imageData + y * prcs_flg->widthStep); // pointer to access the present value of pixel in Process flag
uchar* scn_prsnt; // pointer to access the present value of pixel related to a particular blob
uchar* scn_next; // pointer to access the next value of pixel related to a particular blob
for(int x = 0; x < thres->width; ++x ) //Start full scan of the image by incrementing x
{
int c = 0; // Number of edgels in a particular blob
if((prsnt[x] == 0) && (pntr_flg [x] == 0)) // If current pixel is black and has not been scanned before - continue
{
blob_count +=1; // Increment at the start of processing new blob
clr_flg [x] = blob_count; // Update blob number
pntr_flg [x] = 255; // Mark the process flag
n = 1; // Update pixel count of this particular blob / this iteration
cornerA.x = x; // Update Bounding Box Location for this particular blob / this iteration
cornerA.y = y;
cornerB.x = x;
cornerB.y = y;
int lx,ly; // Temp location to store the initial position of the blob
int belowx = 0;
bool checkbelow = true; // Scan the below row to check the continuity of the blob
ly=y;
bool below_init = 1; // Flags to facilitate the scanning of the entire blob once
bool start = 1;
while(ly < h) // Start the scanning of the blob
{
if(checkbelow == true) // If there is continuity of the blob in the next row & checkbelow is set; continue to scan next row
{
if(below_init == 1) // Make a copy of Scanner pixel position once / initially
{
belowx=x;
below_init = 0;
}
checkbelow = false; // Clear flag before next flag
scn_prsnt = (uchar*) (thres->imageData + ly * thres->widthStep);
scn_next = (uchar*) (thres->imageData + (ly+1) * thres->widthStep);
pntr_flg = (uchar*) (prcs_flg->imageData + ly * prcs_flg->widthStep);
bool onceb = 1; // Flag to set and check blbo continuity for next row
//Loop to move Scanner pixel to the extreme left pixel of the blob
while((scn_prsnt[belowx-1] == 0) && ((belowx-1) > 0) && (pntr_flg[belowx-1]== 0))
{
cv_adjustBox(belowx,ly,cornerA,cornerB); // Update Bounding Box corners
pntr_flg [belowx] = 255;
clr_flg [belowx] = blob_count;
n = n+1;
belowx--;
}
//Scanning of a particular row of the blob
for(lx = belowx; lx < thres->width; ++lx )
{
if(start == 1) // Initial/first row scan
{
cv_adjustBox(lx,ly,cornerA,cornerB);
pntr_flg [lx] = 255;
clr_flg [lx] = blob_count;
start = 0;
if((onceb == 1) && (scn_next[lx] == 0)) //Check for the continuity
{
belowx = lx;
checkbelow = true;
onceb = 0;
}
}
else if((scn_prsnt[lx] == 0) && (pntr_flg[lx] == 0)) //Present pixel is black and has not been processed
{
if((clr_flg[lx-1] == blob_count) || (clr_flg[lx+1] == blob_count)) //Check for the continuity with previous scanned data
{
cv_adjustBox(lx,ly,cornerA,cornerB);
pntr_flg [lx] = 255;
clr_flg [lx] = blob_count;
n = n+1;
if((onceb == 1) && (scn_next[lx] == 0))
{
belowx = lx;
checkbelow = true;
onceb = 0;
}
}
else if((scn_prsnt[lx] == 0) && (clr_flg[lx-2] == blob_count)) // Check for the continuity with previous scanned data
{
cv_adjustBox(lx,ly,cornerA,cornerB);
pntr_flg [lx] = 255;
clr_flg [lx] = blob_count;
n = n+1;
if((onceb == 1) && (scn_next[lx] == 0))
{
belowx = lx;
checkbelow = true;
onceb = 0;
}
}
// Check for the continuity with previous scanned data
else if((scn_prsnt[lx] == 0) && ((clrprev_flg[lx-1] == blob_count) || (clrprev_flg[lx] == blob_count) || (clrprev_flg[lx+1] == blob_count)))
{
cv_adjustBox(lx,ly,cornerA,cornerB);
pntr_flg [lx] = 255;
clr_flg [lx] = blob_count;
n = n+1;
if((onceb == 1) && (scn_next[lx] == 0))
{
belowx = lx;
checkbelow = true;
onceb = 0;
}
}
else
{
continue;
}
}
else
{
clr_flg[lx] = 0; // Current pixel is not a part of any blob
}
} // End of scanning of a particular row of the blob
}
else // If there is no continuity of the blob in the next row break from blob scan loop
{
break;
}
for(int q = 0; q < thres->width; ++q) // Blob numbers of current row becomes Blob number of previous row for the next iteration of "row scan" for this particular blob
{
clrprev_flg[q]= clr_flg[q];
}
ly++;
}
// End of the Blob scanning routine
// At this point after scanning image data, A blob (or 'connected component') is obtained. We use this Blob for further analysis to confirm it is a Marker.
// Get the Rectangular extent of the blob. This is used to estimate the span of the blob
// If it too small, say only few pixels, it is too good to be true that it is a Marker. Thus reducing erroneous decoding
rectw = abs(cornerA.x - cornerB.x);
recth = abs(cornerA.y - cornerB.y);
aspect_ratio = (double)rectw / (double)recth;
if((n > min_blob_sze) && (n < max_blob_sze)) // Reduces chances of decoding erroneous 'Blobs' as markers
{
if((aspect_ratio > 0.33) && (aspect_ratio < 3.0)) // Increases chances of identified 'Blobs' to be close to Square
{
// Good Blob; Mark it
cvRectangle(img,cornerA,cornerB,CV_RGB(255,0,0),1);
}
else // Discard the blob data
{
blob_count = blob_count -1;
}
}
else // Discard the blob data
{
blob_count = blob_count -1;
}
}
else // If current pixel is not black do nothing
{
continue;
}
} // End full scan of the image by incrementing x
} // End full scan of the image by incrementing y
cvShowImage("Camera",img);
key = cvWaitKey(1); // OPENCV: wait for 1ms before accessing next frame
} // End of 'while' loop
cvDestroyWindow( "Camera" ); // Release various parameters
cvReleaseImage(&img);
cvReleaseImage(&gray);
cvReleaseImage(&thres);
cvReleaseImage(&prcs_flg);
return 0;
}
// End of Main Loop
//------------------------------------------------------------------------------------------------------------------------
// Routines used in Main loops
// Routine to update Bounding Box corners with farthest corners in that Box
void cv_adjustBox(int x, int y, CvPoint& A, CvPoint& B)
{
if(x < A.x)
A.x = x;
if(y < A.y)
A.y = y;
if(x > B.x)
B.x = x;
if(y > B.y)
B.y = y;
}
// EOF







{kind=link}
No comments:
Post a Comment