Depending on the application we tend to extract features such as corners, haar cascades, contours etc in both spatial and/or temporal dimensions.
The code here was initially implemented using OpenCV 1.0, the code works with latest version (2.4.9) as well.
The program basically checks the neighboring pixels lying on a 'Window' around the pixel under test. Consider a sample image thresholded and is under process. The Pixel A as we see from the image below contains optimum number of 'Black Pixels' in the Scanning Window - 5 in total. Whereas Pixels B and C have 3 and 10 respectively. Based on the Window size and a series of tests and inspection we can safely assume that A is a corner while B and C are not. So depending on the Window size and Optimal number if Black or White pixels around the pixel under test, we can mark them as corners.
The Image below is a representative of the code that has been implemented.
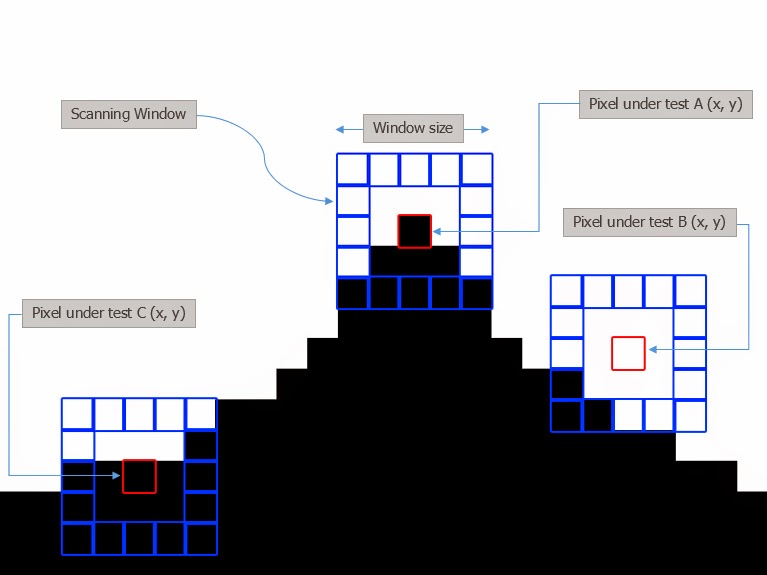
Notice that in the same code below, the number of 'Black Pixels' are being counted.
Also try and experiment by changing
if((sum > 2 ) && (sum < 5))to
if((sum >= 8 ) && (sum < 9))or
if((sum >= 10 ) && (sum <= 11))
Note: FAST has been ported to OpenCV. It is available natively in OpenCV.
http://docs.opencv.org/modules/features2d/doc/feature_detection_and_description.html#fast
Compatibility > OpenCV 1.0
Files:
Download from DsynFLO box folder - https://app.box.com/s/h49lu1ht6mjbapym726z
Source Code:
//______________________________________________________________________________________
// Program : Corner Detection using OpenCV
// Author : Bharath Prabhuswamy
//______________________________________________________________________________________
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
bool find_corner(char* img_data,int img_width,int x,int y); // Routine to check whether a particular pixel is an Edgel or not
// Start of Main Loop
//------------------------------------------------------------------------------------------------------------------------
int main()
{
CvCapture* capture = 0;
IplImage* img = 0;
//IplImage* img = cvLoadImage("test3.jpg"); // for still image
capture = cvCaptureFromCAM( 0 );
if ( !capture ) // Check for Camera capture
return -1;
cvNamedWindow("Camera",CV_WINDOW_AUTOSIZE);
IplImage* gray = 0;
IplImage* thres = 0;
bool init = false; // Flag to identify initialization of Image objects
if(init == false)
{
img = cvQueryFrame( capture ); // Query for the frame
if( !img ) // Exit if camera frame is not obtained
return -1;
// Creation of Intermediate 'Image' Objects required later
gray = cvCreateImage( cvGetSize(img), 8, 1 ); // To hold Grayscale Image
thres = cvCreateImage( cvGetSize(img), 8, 1 ); // To hold OTSU thresholded Image
init = true;
}
int ihist[256]; // Array to store Histogram values
float hist_val[256]; // Array to store Normalised Histogram values
int pos ; // Position or pixel value of the image
float prbn; // First order cumulative
float meanitr; // Second order cumulative
float meanglb; // Global mean level
int OPT_THRESH_VAL; // Optimum threshold value
float param1,param2; // Parameters required to work out OTSU threshold algorithm
double param3;
int h,w; // Variables to store Image Height and Width
h = img->height; // Height and width of the Image
w = img->width;
CvPoint corner;
bool corner_flag;
int key = 0;
while(key != 'q')
{
//Step : Capture Image from Camera
//Info : Inbuit function from OpenCV
//Note :
img = cvQueryFrame( capture ); // Query for the frame
//Step : Convert Image captured from Camera to GrayScale
//Info : Inbuit function from OpenCV
//Note : Image from Camera and Grayscale are held using seperate "IplImage" objects
cvCvtColor(img,gray,CV_RGB2GRAY); // Convert RGB image to Gray
//Step : Threshold the image using optimum Threshold value obtained from OTSU method
//Info :
//Note :
memset(ihist, 0, 256);
for(int j = 0; j < gray->height; ++j) // Use Histogram values from Gray image
{
uchar* hist = (uchar*) (gray->imageData + j * gray->widthStep);
for(int i = 0; i < gray->width; i++ )
{
pos = hist[i]; // Check the pixel value
ihist[pos] += 1; // Use the pixel value as the position/"Weight"
}
}
//Parameters required to calculate threshold using OTSU Method
prbn = 0.0; // First order cumulative
meanitr = 0.0; // Second order cumulative
meanglb = 0.0; // Global mean level
OPT_THRESH_VAL = 0; // Optimum threshold value
param1,param2; // Parameters required to work out OTSU threshold algorithm
param3 = 0.0;
//Normalise histogram values and calculate global mean level
for(int i = 0; i < 256; ++i)
{
hist_val[i] = ihist[i] / (float)(w * h);
meanglb += ((float)i * hist_val[i]);
}
// Implementation of OTSU algorithm
for (int i = 0; i < 255; i++)
{
prbn += (float)hist_val[i];
meanitr += ((float)i * hist_val[i]);
param1 = (float)((meanglb * prbn) - meanitr);
param2 = (float)(param1 * param1) /(float) ( prbn * (1.0f - prbn) );
if (param2 > param3)
{
param3 = param2;
OPT_THRESH_VAL = i; // Update the "Weight/Value" as Optimum Threshold value
}
}
cvThreshold(gray,thres,OPT_THRESH_VAL,255,CV_THRESH_BINARY); //Threshold the Image using the value obtained from OTSU method
int c = 0;
for( int y = 0; y < thres->height; ++y) //Start full scan of the image by incrementing y
{
for(int x = 0; x < thres->width; ++x ) //Start full scan of the image by incrementing x
{
// Number of edgels in a particular blob
corner_flag = find_corner(thres->imageData,thres->widthStep,x,y);
if(corner_flag == true) // Check for the Edgel and update Edgel storage
{
c++;
corner.x = x;
corner.y = y;
cvCircle(img,corner,1,CV_RGB(255,0,0),1,8);
corner_flag = false;
}
}
}
cvShowImage( "Camera",img);
key = cvWaitKey(1); // OPENCV: wait for 1ms before accessing next frame
//key = cvWaitKey(50000); // for still image
} // End of while loop
cvDestroyWindow( "Camera" ); // Release various parameters
cvReleaseImage(&img);
cvReleaseImage(&gray);
cvReleaseImage(&thres);
return 0;
}
// End of Main Loop
//------------------------------------------------------------------------------------------------------------------------
// Routine to check whether a particular pixel is an Edgel or not
bool find_corner(char* img_data,int img_width,int x,int y)
{
const int wind_sz = 5 ;
int wind_bnd = (wind_sz - 1) / 2;
int sum = 0;
bool result = false;
uchar* ptr[wind_sz];
int index =0;
for(int k = (0-wind_bnd); k <= wind_bnd; ++k)
{
ptr[index] = (uchar*)(img_data + (y + k) * img_width);
index = index + 1 ;
}
for(int i = 0; i <= (wind_sz-1); ++i)
{
if((i == 0) || (i==(wind_sz-1)))
{
for (int j = (0-wind_bnd); j <= wind_bnd; ++j)
{
if(ptr[i][x+j] == 0)
sum += 1;
else
continue;
}
}
else
{
if(ptr[i][x-wind_bnd] == 0)
sum += 1;
else
continue;
if(ptr[i][x+wind_bnd] == 0)
sum += 1;
else
continue;
}
}
if((sum > 2 ) && (sum < 5))
{
result = true;
}
return result;
}
// EOF